【フレキシブル基板にチャレンジ】シリーズ とは
エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けしています。
これまでもいろいろなシリーズを展開してきましたが、新シリーズとして浸水センサー編がスタートしました。ご期待ください。
挨拶
こんにちは、平野です。お久しぶりです。このシリーズでは、p-flexを用いて簡単な浸水センサーを制作しています。
前回↓
前回までのあらすじ
厳重な防水が必要な水中ロボットに搭載できる、浸水を検知するためのセンサーを作りたい!というモチベーションでこの企画は始まったのでした。
(紹介:東京工業大学ロボット技術研究会-アクア研)

ここまでの記事では、フレキシブル基板を使えば狭い場所や曲がった接合箇所にもセンサーを這わせることが出来て便利そう!ということで試作品の製作を行っていました。
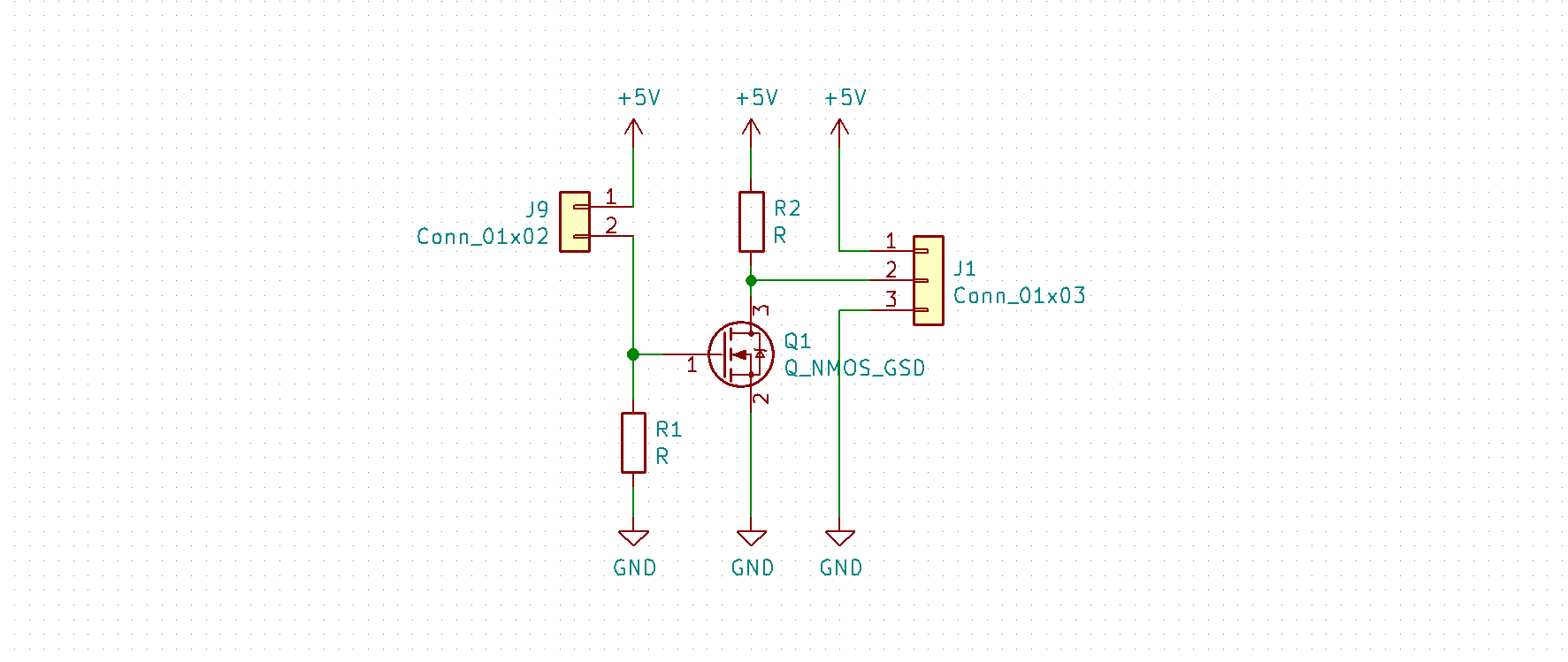
前回は、浸水しているか否かに応じてデジタル信号を返す回路(と行っても本当に簡単なものです)を組み込んだ新しい基板を設計&発注しました。
発注したデータがこちら↓
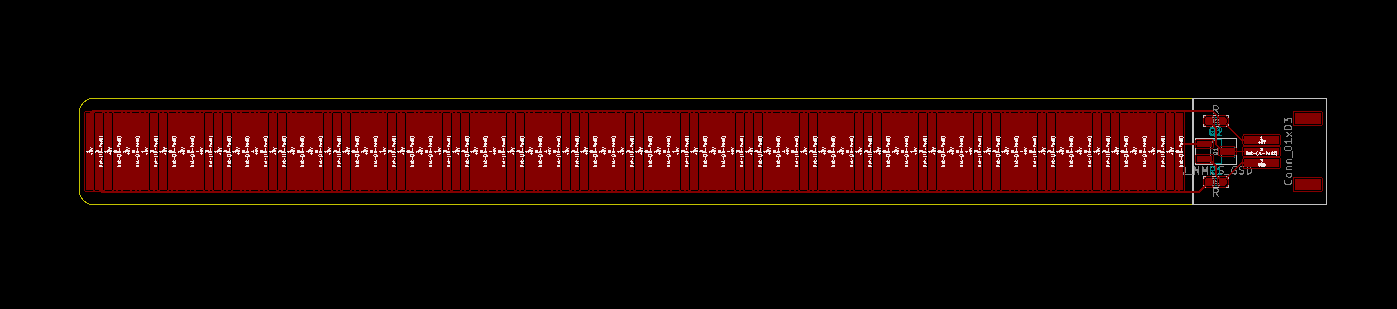
基板の材質にはPI(ポリイミド)とPETが選択できますが、今回は浸水センサーということでやはり吸湿性の低いPETを選択しました。
浸水センサーにぴったりの素材ですね!
届きました
というわけで、実際に届いたのがこちらになります!
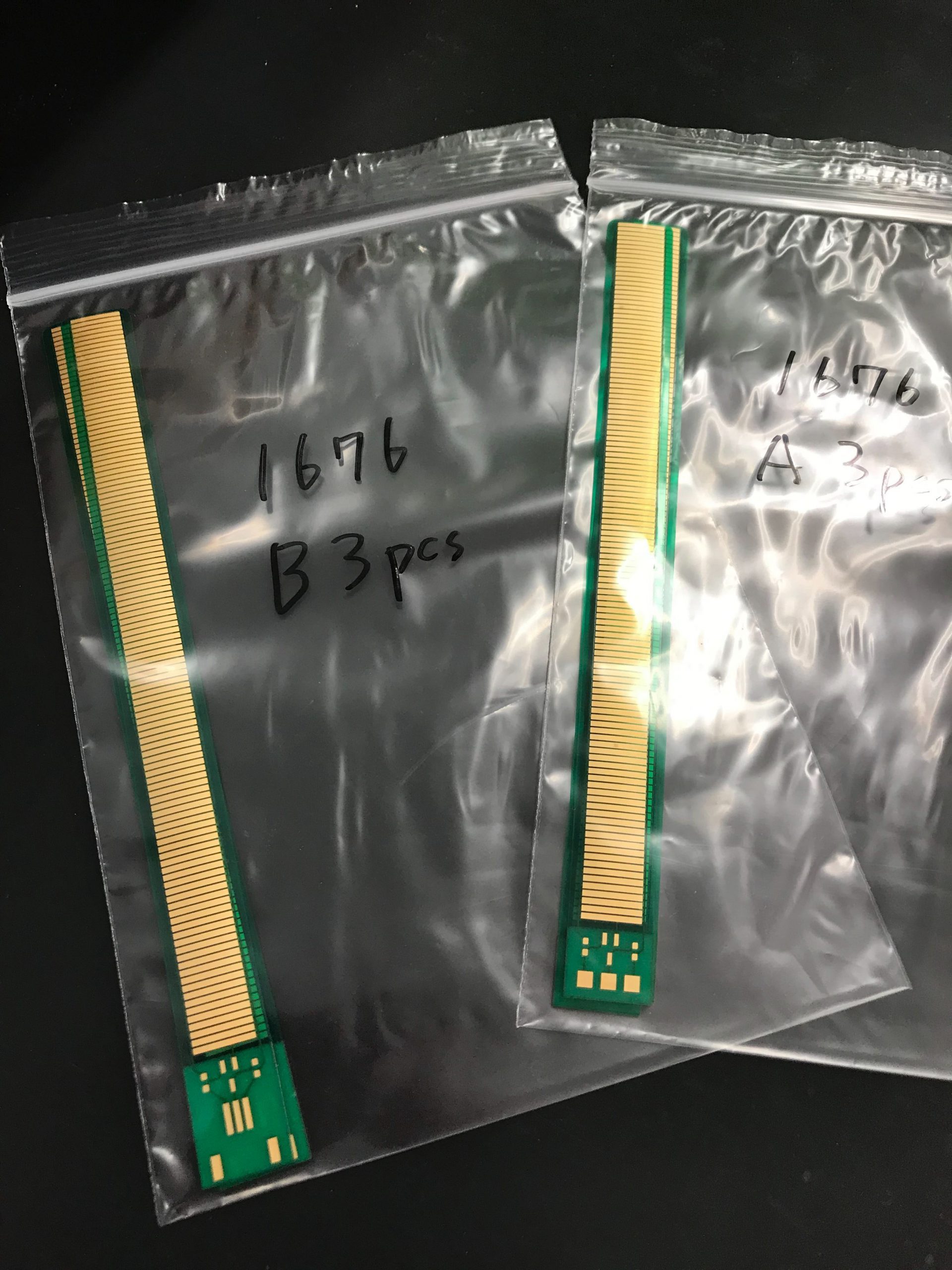
金メッキが美しいですね……!
今回のセンサー基板は用途上水中に沈めることになるため、銅箔部分に金メッキを施してもらうことによってサビを防止しています。
また、部品を実装する部分には裏に補強板を貼り付けないと実装できない(実装しても半田の部分で剥がれて壊れてしまう)ので、補強板を取り付けています。
本当に水中ロボットで使用するときはこの部分の防水も考えなくてはいけないのですが、今はいったん考えないでおきましょう…(防水が必要な場合樹脂ポッティングという手法で部品そのものをコーティングして防水することもあるようです)
とりあえず、チップ部品を実際に載せて動くかどうかをテストしていきます。
地味にフレキシブル基板のはんだ付けを手でやるのは久しぶりですが…
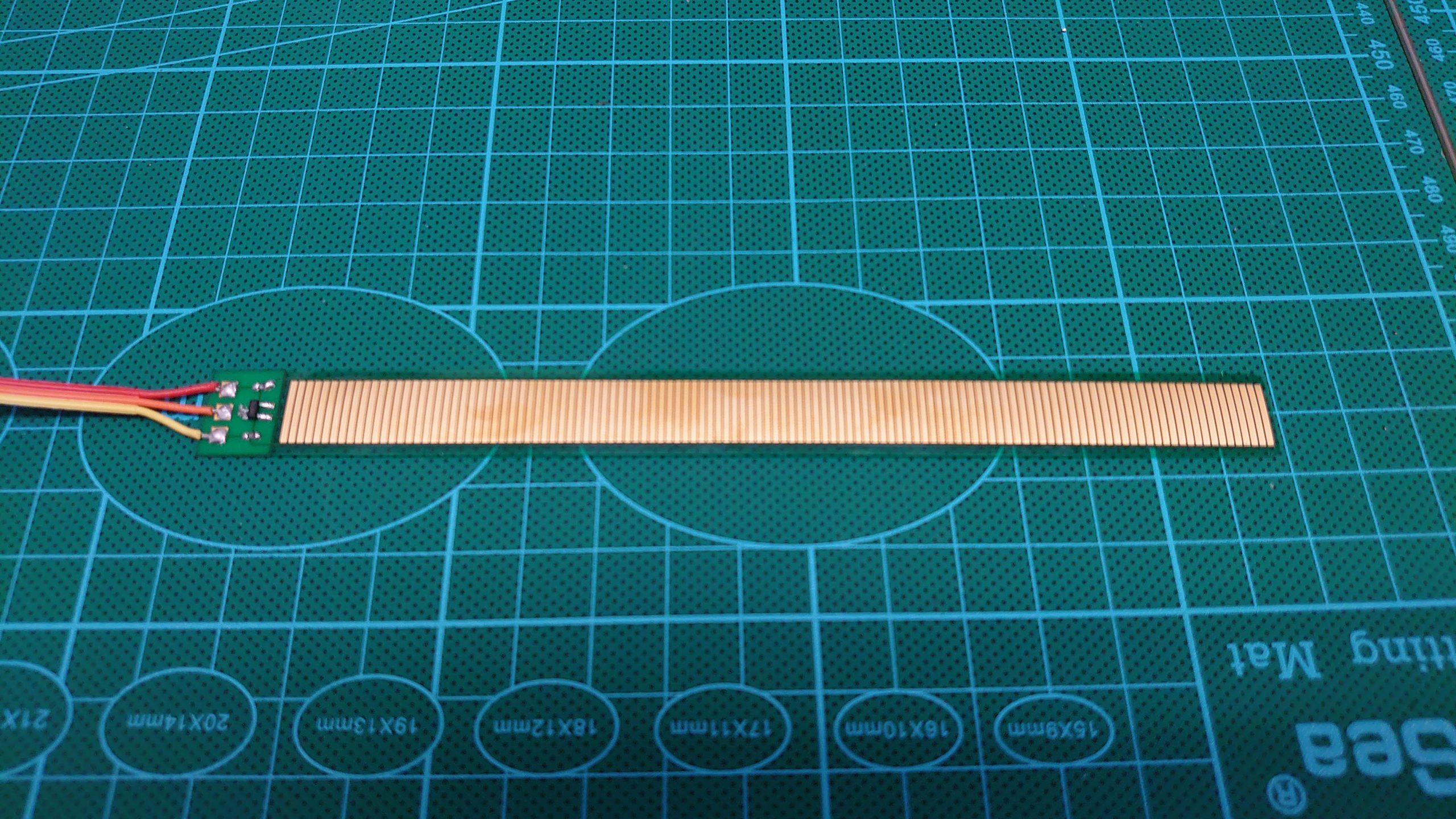
できました!
ちなみに今回の基板ではPET基材を採用したと述べましたが、PETは融点が低いため実は一般的なはんだを用いてはんだ付けを行うとすぐに基板が溶けたり歪んだりしてしまいます。
そこで、今回のはんだ付けは通常のはんだより大幅に融点の低い低温はんだを用いてはんだ付けを行いました。低温はんだを用いることで、PET基材のP-Flexに対しても普通の基板とあまり変わらない感覚ではんだ付けをすることができました。
上の写真の私のはんだ付けはお世辞にもきれいとは言えない代物ですが、せいぜい0608サイズのパーツが3つなので特に苦労することもなくはんだ付けをすることができました。
実際にマイコンにつないで動かしてみた動画がこちら。
水に触れた瞬間、LEDが点灯するのがわかります。無事動作してくれました……良かった……。
ロボットに搭載したい
それでは実際に水中ロボットに搭載してみましょう!
…と言いたいところだったのですが、コロナ騒動によりサークル活動が自由にできなくなった等の理由でなかなか都合がつかず、残念ながら実際に水中ロボットに乗せて動かしたところをお見せすることが出来ません。
本当は基板自体もかなり前に完成しており、どうしようかな…と思っていたのですが、とりあえず今回はここまでの内容で紹介させていただくことにしました。いつか実装したところもお見せできたら嬉しいですね!
今回はここまで
というわけで、今回の内容は以上になります。
また、残念ながら浸水センサー編もここで一旦区切りという形になりそうです。最後なんだか締まらない感じになってしまいましたが、今回の企画では金メッキの綺麗な基板を作ることが出来て個人的には楽しかったです。
それではまた別の記事でお会いしましょう!