【フレキシブル基板にチャレンジ】シリーズ とは
【フレキシブル基板にチャレンジ】シリーズ 記事を全部見る
エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けします。
電卓編の次のシリーズとして新たにロボットアーム編のスタートです。引き続きよろしくお願いします!
<< 前の記事 次の記事 >>
挨拶
こんにちは、高橋です。
今回は機体設計リベンジ編です。ところでrevengeっていうのは私怨による報復行動らしいですね。
前回のあらすじ
前回はフレキシブル基板をバネのように曲げてみたのですが、曲げ耐久が保証できないのでこの曲げ方式は使えないことに。
よって別の曲げ方式を採用することになり、応じてロボットアーム自体も設計が変更になりました。
あと今まで何個か危うい点があったのでその辺をまとめて修正。
サーボ新調
以前の機体で何故ギアを使っているのか疑問に思った方もいたのではないでしょうか。記事の方では一切触れずに進めてきましたが…
その理由は、採用していたサーボモーターSG90のトルク不足です。ただこれは決してSG90が悪かったわけではなく、トルクに関する試算を全くせずにとりあえず安いの買っとけば?的な適当さでこれを選んだ我々のミスです。
秋月電子のページによると、SG90のトルクは1.8kgf・cmでした。これでは力不足だったため、今までのアームでは根本に1:3のギアを装備してトルクを3倍にしていました(このあたりに行き当たりばったり感がすごい出てる)。それでもギリギリ力が足りなかったりしたので、今回は思い切ってちょっと高級なサーボを購入。
Amazonのページによると、今回購入したサーボMG996Rのトルクは9.6kgf/cm。実に5倍以上あります。値段も5倍。
本体の重さも増えますが、これならきっと大丈夫でしょう。きっと。また足りなかったら減速すればいいし
ギア廃止→ワイヤ駆動
ギアを使わなくなってよくなったのならサーボとアームを直結すればいいじゃない…ともいかない事情がここにありまして。
前回の最後に述べたように今バージョンではフレキシブル基板を軸に巻き付ける方式を採用します。つまり(ここにある図を見てもらえればわかりやすいと思うのですが)軸がなくてはならず、必然的にサーボに直結はできないのです。
しかしギアの設計と軸間距離の調整には死ぬほど苦労したので、力を伝えるためにギアではなくワイヤを採用することにしました。

凧糸!!!!! 古き良き温かみのある手作り感(575字余り)
理想を言えばチェーンとかスプロケットを使いたいんですけど高いし結局軸間距離調整が必要なので…でもこれもなんかダメになる気がする…無理だったらギアに戻そう
その他ちょっとした変更集
こういうものを設計したのは初めてだったので許してほしいのですが、初期の設計は変更や微調整が必要な部分とあまり変更が必要ない部分が一体になっていて、微調整の度に再印刷が必要というクソダメ設計でした。なのでパーツ分割ラインを変更。最初からこうしておけばよかったな~。
また、今まではアーム基板とArduinoを繋ぐ線を土台の下から出していたのですが、これも設計変更。言葉で説明するのは難しいので写真をどうぞ。機構自体はサーボ接続の関節と同じようなものです。

△試作の紙基板と共に
それとアーム先端のハンド部分の一部を薄くして板ばねのようにすることで、多少弾力を持たせて簡単にはぶっ壊れないようにしました。流行りのソフトロボットを若干リスペクト(?)。
あ、ソフトロボットというのはアクチュエータとか構成骨子が柔らかいロボットのことで、正確な位置決め性能などが若干失われる代わりにモノを優しく持てたり機体の耐久力が上がったりします。
完成
デーン
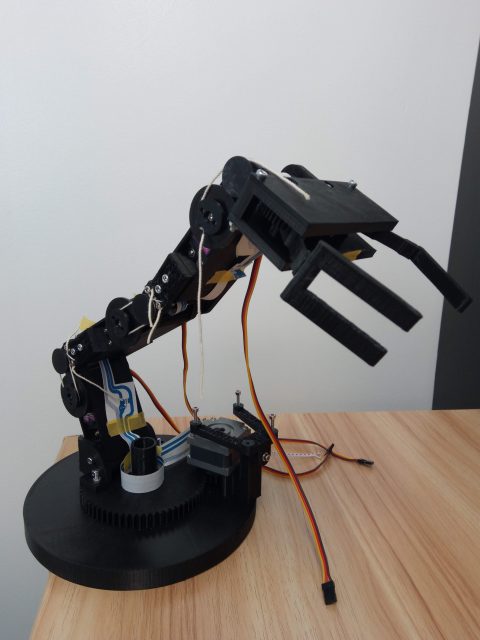
ちなみに軽くプログラムの話をしておくと、サーボ3つとPWMでのDCモーター1つとステッピングモータ1つを1つのarduinoで動かすのは不可能だったのでシールド上にもう一つATmega328Pを載せています。接続はI²CでMasterがステッピングモータとDCモータの駆動、slaveがサーボ3つを動かしています。入力はシリアル通信で接続したPCからのxy座標値で、内部で極座標値に変更してモーターを回しています。Arduinoは楽ですね。
次回予告
次回は基板再設計編です。今回ちゃっかり紙で登場しているモノの解説をします。