2018年11月27日 WeWork ギンザシックス にて Future of Intelligent Material 展 -電子デバイスの未来のカタチ- を開催いたしました。
このイベントでは新しい回路素材の展示や、それから生まれるデザインについてのプレゼンテーションを行い、”電子機器のデザインが変わる可能性” を実際に体験して頂きました。
ERATO 川原万有情報網プロジェクトの作品
ERATO 川原万有情報網プロジェクトの作品のうち Elephantech が関わらせて頂いた作品の展示と紹介をしていただきました。
『折り紙ロボット(180度折)』『くねくねロボット(ひらむしロボット)』などの、フレキシブル基板 P-Flex® を利用したERATO 川原 万有情報網 プロジェクトによる「Origami Robots with Flexible Circuit Sheets」と題した研究デモ発表は、シンガポールで開催されたACM UbiComp 2018において Best Demo Award を受賞しました。

動画より
(川原)
東京大学の川原です。皆さんこんばんは。
Elephantechとの関係は、杉本さんが説明してくれたとおりです。
私たちはElephantechなどと連携しながら、ちょっと先の宿題になりそうな現場からの問題を大学で引き取っていくかたちで連携をさせてもらっています。
Elephantech、AgICを始めたときに一番最初によく聞かれたことは
「二次元はいいんだけど、3Dプリンター流行っているけれど三次元できないの?」
みたいな話でした。3Dプリンターに、導電性ペーストを組み込んで三次元物体を作ることもできるでしょうけれど、そんなことしなくても二次元で高速に印刷して、それから折ったほうが早いことを示すために、折り紙も研究も始めました。
今日持ってきているのは、このハニカムのものと、折り紙のイモムシ型のロボットと、そういうイモムシのロボットなどができたときに使われる信号の無線給電の技術の3つです。
一つ一つ意味を説明しますと、このハニカムは実は半自動で折れるようになっています。
折り紙は研究が進んでいて、三次元形状を与えると、二次元の展開図(折り線)を自動で作れるような理論ができています。
ただ、それを実際に上手に折ることはなかなか難しく、しかも手で折るとなると大変です。
なるべく機械を使って自動で折れることを目指していて、特にそれが簡単にできるのがこのハニカムです。

1枚の紙から折り目を付けてバタバタと自分でたたむだけで、この形ができます。
残念ながらこちらのデモ品4つはそうではありませんが、1枚の紙に回路の配線を入れて、ちょっとした伸縮の機構を入れることによって、上手に動きを生み出すというのがこちらです。
今2つのセグメントがあって、これはもともと折り紙でピンセットを作る折りの方法が編み出されていて、それを上手に使っています。
横に力を加えると、縦に縮むという構造を上手に使って、この上にエネルギーを通すための配線が入っています。
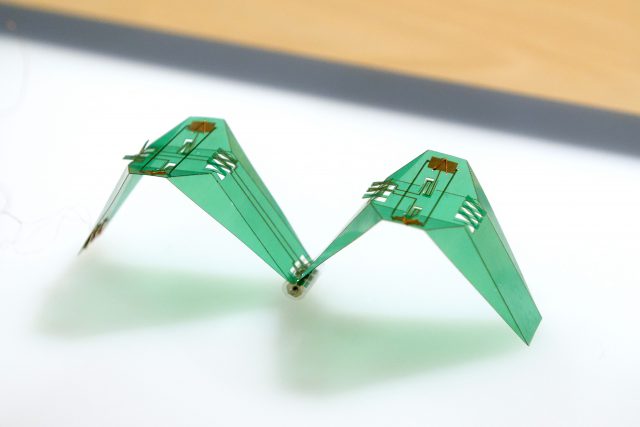
従来、折り紙は折り目を付けるので、回路を印刷しても折り目で断線をしてしまって電気を流せませんでした。
でもElephantechの折りの構造を上手に使うことで、その問題を回避することができ、イモムシロボットが実現しました。
かわいく動いていますが、この動かし方のタイミングも割と深淵なる世界、数学の世界が待っていまして、摩擦や重さでこの最適なタイミングが決まっています。
それをAIで学習させることも研究でやっています。
余談になりますが、カイコの歩き方とシャクトリムシの歩き方とミミズの歩き方は全部違います。
それも環境条件をシミュレーターに突っ込んでやると、ミミズが生まれたり、カイコが生まれたりします。
これはカイコです。
続きを聞きたい人はあとで来てください。
もう一つ、これも刺さる人には刺さるオタクな技術です。
実はこれは1本しか線がありませんが、4つのアクチュエーターが独立に動いていて、しかも全部アナログです。

デジタルで処理をせず、ICとか乗っていません。
単に印刷した上に、ちょっとしたアナログの素子を置くだけで、4つのアクチュエーターが独立に動きます。
この中に高周波の電流が流れていまして、それを特定のアクチュエーターのところだけを特定の周波数を通すことによって独立に制御しています。
それで、このようにのた打ち回るような変な動きをしています。
今4チャンネルですが、理論的には100チャンネルとかできるので、例えばムカデのような多関節ロボットの足を一つ一つ独立に制御するけれど、配線は1本だけでいいということをやる技術として開発しました。
私たちは平面の上にいろいろな機能を上手に印刷とか、折り紙のアルゴリズムを使って生み出すということを今(研究)しています。
関連リンク